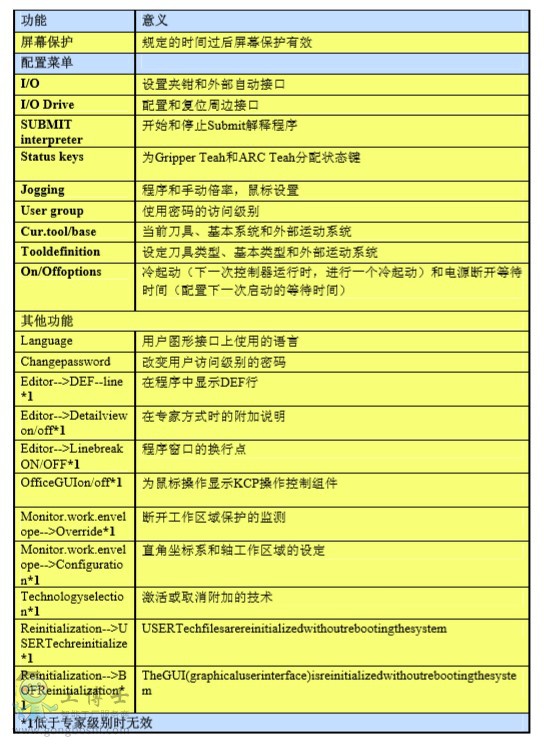
為了能夠設置屏幕保護,要求WINDOWS結構的鍵盤,因而必須轉換到專家級別 .這些應用在標準級別時不能實現.
有關WINDOWS結構的鍵盤的詳細說明參閱Operating Handbook, 在資料[Operator Control]的[The KUKA Control Panel KCP]章的 “Toggling to the Windows interface”節
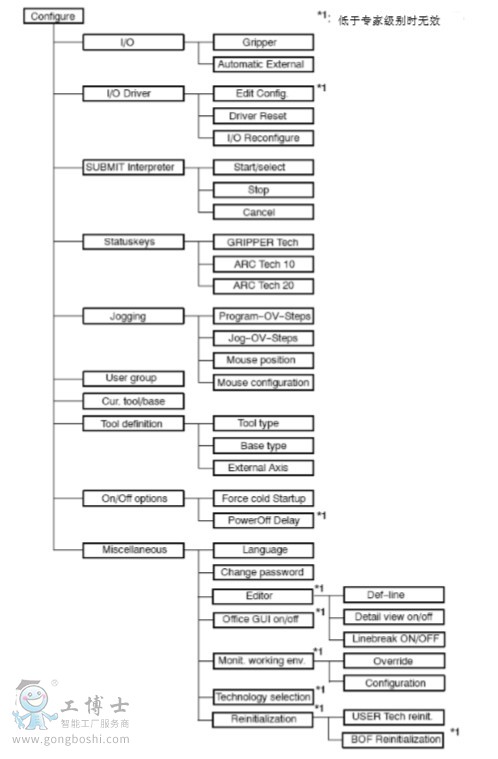
1.3.3 Submit 解釋程序
Submit解釋程序是一個后臺運行程序,它與機器人程序同時運行.由于這個程序運行完 全獨立于選擇的機器人程序,所以它能夠用于不同控制任務的所有方式.這些可以包 括,例如,冷卻回路的控制與監視,安全設備的監視和附加的周邊設備的監視.當這些任 務能由KRC1調整時,這個能夠呈現一個附加的PLC有較少的不必要的任務. 這兒你能夠開始、停止或取消Submit解釋器。
Submit解釋器的狀態在任何給定的時間都顯示在狀態行上,綠色意味著解釋器正在運 行,紅色表示解釋器在停止,如果色彩不明亮,表示沒有選擇Submit解釋器。
POV值通常以1%的增量變化.項目“Program--OV—Steps on/off”使編程的速度改變為 100、75、50、30、10、3、1%。
使用程序倍率狀態鍵右面的“+/-”鍵設置倍率。
在Operating Handbook 的[Executing, stopping and resetting a program]章的“Setting workvelocity (program override)”部分,也有關于程序倍率的說明。 1.3.5.2Jog--OV--Steps(HOV) 手動倍率值通常也以1%的增量改變.項目“Jog--OV--Stepson/off”使手動快速的改變為 100、75、50、30、10、30、3、1%。
使用手動倍率狀態鍵右面的“+/--”鍵設置倍率。
詳細說明請參考Operating Handbook的[Manual traversing of the robot],的“Jog override (manual traversing velocity )”. 1.3.5.3 鼠標的位置 如果使用鼠標移動機器人在機器人坐標系統里,操作者能獲悉他所處位置的控制器.
關于鼠標定位的詳細說明請參考Operating Hand book的[Manual traversing of the robot] 章的“Moving the robotwith the Space Mouse ”.
1.3.5.4鼠標配置
這兒你能夠鼠標的靈活度和它控制的軸
關于鼠標配置的詳細說明請參考Operating Hand book, 的[Manual traversing of the robot]章的“Moving the robotwith the Space Mouse” 部分. 為了增加系統的安全性,對確定的用戶限制機器人的功能和編程,由用戶級別限制 存取這些功能。使用密碼進行保護。 確省時,KRC控制器的軟件對于一般用戶和專家用戶有著區別。用戶借助于菜單編 程時,不要求確認語法。當系統裝入時用戶級別自動設置到確省值。 如果用戶級別的功能無效,可以轉換到專家用戶級別。專家用戶能夠使用ASCII鍵盤, 采用KRL語言編程(KUKA 機器人語言),編輯系統或初始化文件(總線系統)。KRL 是一個高級別的PASCAL編程語言,它適合編程復雜的任務。 Password 專家用戶級別由密碼保護。按菜單“Configure”,打開一個包含有 “User group” 菜單 項目,改變到專家用戶級別。
1.3.9.1強制冷起動
這個菜單對一般和專家級用戶都有效。當強制進行一個冷啟動、系統裝入時,控制 器顯示Navigate,沒有程序被選擇,控制器被完全地初始化.
作為確省設置,菜單指令“Force cold start ” 不保留,當要求一個冷啟動時,它必須是 有效的。
另一方面,在熱啟動時,控制系統自身執行一個電源斷開,以前選擇的程序被恢復。 系統內部的狀態,例如:程序、塊指針、變量內容和輸出被完全保存。電源會發生 故障,例如:供電故障、程序運行期間主開關故障。 如果控制器在啟動后檢測到一個系統故障或變更的數據,它自動地強制一個冷啟動。
關于電源故障的附加說明在OperatingHand book 的[Operator Control ]章,[Running up /shutting Down the controller]節。